|
THE REGULATOR
Very important in industrial instrumentation for the usefulness of its use and for the development which it can give rise, is the automatic control system (Regulator - Controller).
The purpose of this system is to preserve a existing equilibrium in a process, and / or to restore it when for whatever reason it is disturbed (temperature, pressure, etc.).
Each automatic control system requires a process, containing the variable to be measured and adjusted, and the control system, based on the concept of feedback.
The elements necessary for the realization of regulator are shown in the following figure.
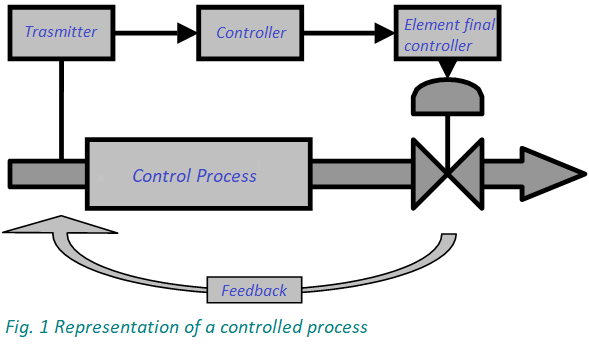
To facilitate understanding of this complex in Figure 2, an example with practical application of the feedback.
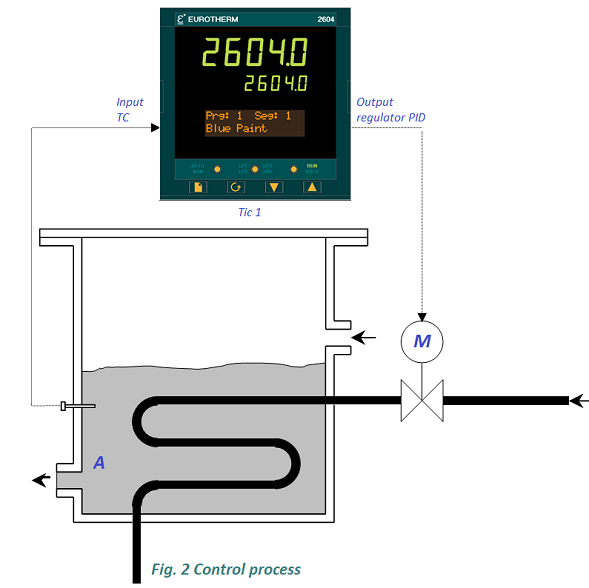
In this example, the temperature controller TIC1 maintains the temperature of liquid A at the desired value by passing hot steam into a coil. The temperature of liquid A is the controlled variable, while liquid A in the tank is the controlled element. The heating steam is the control agent, and probe immersed in the liquid is the sensitive element (Transmitter).
From temperature transmitter the variation reaches the controller / regulator which is the measurement is processed. The result of this processing is sent as a power signal to final control element (in the example servomotor valve or positioner).
ON-OFF Regulation
This type of regulator uses a final element, for example a valve which moves from one position to another as soon as the controlled variable deviates from the predetermined regulator point. It is not necessary that the two positions are always the extreme (all closed or fully open).
Intermediate situations can also be used as shown in figure 3.
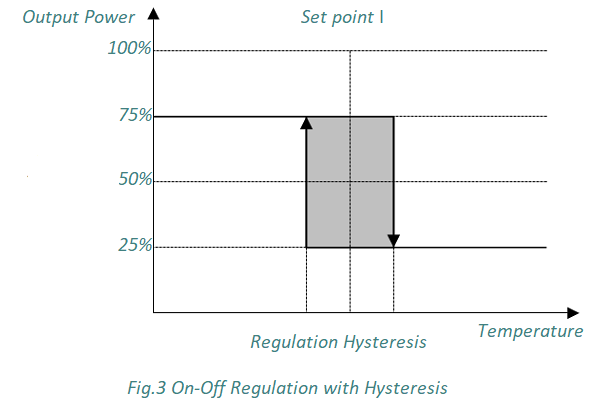
The value variable can be offset because the final control element intervenes (variation) according to the controller's hysteresis.
From the examination of this type of regulator, it can be deduced that the regulated variable continues to oscillate over the set point.
It should be noted that it is not advisable a too small hysteresis to avoid excessive frequency in the intervention of final regulator element which in case a remote control could quickly wear out.
The two-position adjustment type is used for its simplicity where it is acceptable to adjust a variable with little precision.
Propotional Regulation
The proportional regulation consists of a linear relationship between the value of adjusted variable and the position of the final control element.
The characteristic equation of a proportional regulator is as follows:
y = y0 ± k ( x - x0 )
where y and y0 are the instantaneous and initial values of opening the regulating valve, x and x0 are the instantaneous and initial values of variable, while k is the constant proportionality factor (gain).
The range scale of variable which this relation is expressed is called the proportional band and its amplitude It can change.
At each variable value within the proportional band, only one position of final element (valve) corresponds. Outside the proportional band the valve moves to operating at limit positions (for example 0% and 100%). The amplitude of the proportional band is generally expressed as a percentage of the regulator measuring range (range of the instrument).
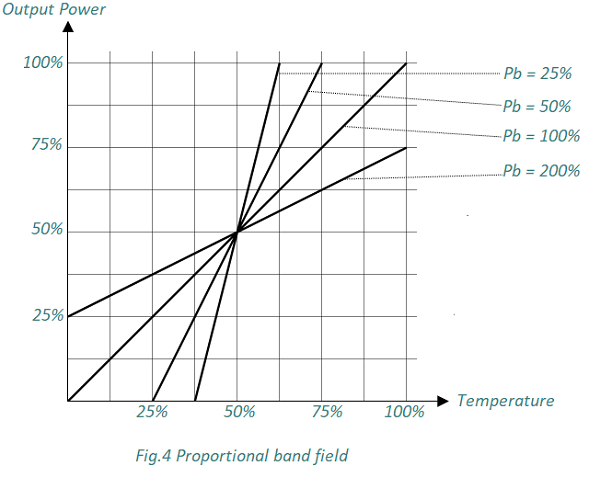
For example, if an instrument has a measuring range from 0 to 100 and its control valve is moved from one end (all closed) to the other (fully open). In the range 25 to 75, the amplitude of the proportional band is of:
Pb = (100 / Range)*(75 - 25) = (100 / 100)*50 = 50
The instrument set-point is within the proportional band and usually not far from its center.
The proportional regulator allows gradual (proportional) movements of the final element, is more suitable for accurately dosing the output power to keep the process in balance. The proportional action causes a corrective action, whose amplitude is directly proportional to the deviation of the variable from the predetermined point. If there is a two-way relationship between the regulated variable and the valve position, the proportional regulator cannot automatically compensate for load variations to maintaining the variable at the predetermined set point.
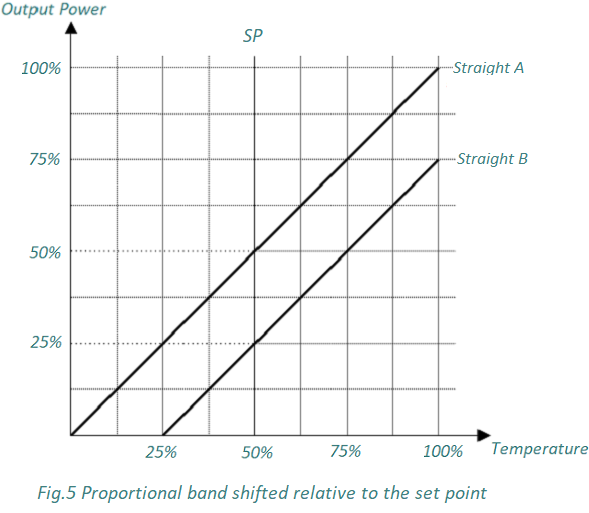
Referring to Figure 5, let us suppose for example, that the proportional band is that concerns the straight line A with indication of valve position at 50% when the variable coincides with the point predetermined to 50% of the scale.
Let us now assume that there is a variation in the load in the process whereby the variable goes to 75% of the scale and giving rise to an error which compared with set point is 25%. The only way that proportional regulator reacts is to position the valve at 75% in automatically (straight line A). If, again, the variable dropped to 25% of the scale, the valve would be positioned at 25%. Therefore, there is an error between the set point and the variable that cannot be corrected by the proportional action only.
However, where the load variations are slight, the proportional regulator is more than reliable.
INTEGRAL PROPORTIONAL REGULATION P.I.
We have seen that the proportional regulator doesn't keep the variable on the set point as the process load varies. To do this, from the example of figure 5, it is intuitive that it is sufficient to move the straight line A until the work point coincides with the desired set point.
Manually to do this, the value of the PI parameter (Eurotherm) will changed.
The integral action, added to the proportional action, and automatically cancels the deviations between variable and set point.
The integral action is calculated manually as follows:
The procedure described here only applies to temperature settings or, more generally, where there are adjustment processes with slow responses. In order to regulator manually (tuning) the integral and derivative parameters, the instrument must be first set to on-off control with minimum adjustment hysteresis:
Pb = 0.0 Hys = 0.1 (Minima)
Set the desired value and wait for the variable to oscillate around set point
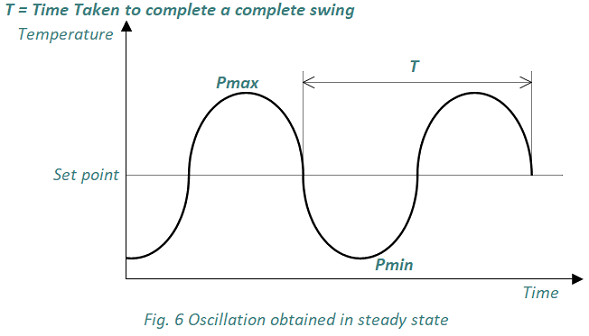
As can be seen in Figure 6, at the fourth or fifth oscillation, ie when the system has stabilized, detect the time of a complete oscillation T:
Calculate integral and derivative times with the following equations:
Ti = 0,5 T Td = 0,125 T
The integral proportional regulation (PI) is generally the most useful and the most used, being suitable for most of processes with the most varied characteristics, and having the advantage of eliminating the deviation of variable from the set point to varying the load, thus allowing obtain continuous and precise regulator without deviations.
DERIVATIVE INTEGRAL PROPORTIONAL REGULATION (P.I.D.)
Very slow processes, such as temperature regulation, are sometimes difficult to regulate if using only proportional and integral actions, since to avoid oscillations of the whole system very wide proportional bands and very low integral actions should be adopted. In this way, a good regulator is obtained, but the regulator's response to a sudden disturbance is very slow. This would entail at each load change significant deviations absorbable over a period of time that is too long. On such processes, where a temperature is often found as variable, the addition of derivative action to proportional and integral actions normally solves the problem.
The derivative action causes, following a deviation of the variable from the set point an initially greater correction in the output power so as to counter the disturbance more quickly than proportional or proportional and integral regulation would do. The derivative action provides on the output an action directly proportional to the speed of approaching or moving away from the controlled variable with relative to the setpoint
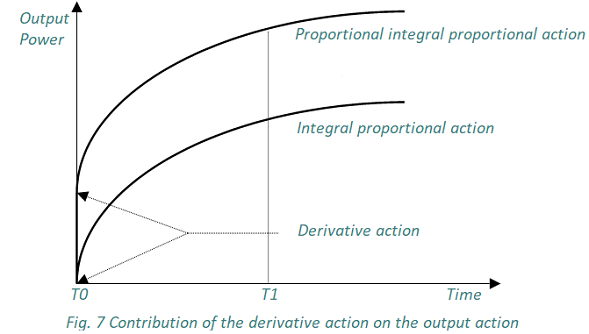
The result consists in obtaining, when a variation of the variable from the set point occurs, an immediate correction which is added to the normal one so as to cause a momentary variation of the output power much faster. In summary, the type of PID regulator produces a change in the position of final control element which is proportional to:
- deviation of the variable from the set point (action P)
- Duration of the deviation (action I)
- Rapid variance of the variable (action D).
www.bennypass.it
|

















