|
ROTORK /YCT YT-1000 Series - YT-1000LDN132S00
The YT-1000 electro-pneumatic positioner works by converting an electrical input signal into a pneumatic output to precisely control a valve actuator. When the electrical signal increases, a torque motor moves a flapper, which changes the nozzle-flapper gap to drop the back pressure in a pilot valve chamber. This causes an exhaust valve to open, supplying air pressure (OUT1) to the actuator, causing it to rotate. The actuator's rotation is fed back mechanically to a cam, which tensions a feedback spring. The actuator stops when the force from the feedback spring balances the force from the input signal. When the input signal decreases, the process is reversed to move the valve back to the new position.
Detailed explanation
- Input Signal: The positioner receives a 4-20mA DC electrical signal from a control system.
- Torque Motor and Flapper: A torque motor responds to the input signal. As the signal increases, it turns the torque motor, causing the flapper to move. This widens the gap between the flapper and a nozzle.
- Nozzle and Pilot Valve: The widening gap allows air to escape from the nozzle, which lowers the back pressure in a pilot valve chamber. This pressure drop causes the pilot spool to move to the right.
- Pneumatic Output: The movement of the pilot spool opens an inlet valve, allowing supply air to flow to the actuator through the OUT1 port. At the same time, an exhaust valve opens, venting pressure from the opposite port (OUT2) if it's a double-acting actuator.
- Actuator Movement and Feedback: The air pressure in the actuator chamber causes the actuator stem to rotate. This rotation is mechanically linked to a feedback mechanism, which includes a cam and spring. The cam increases the tension on the feedback spring as the actuator moves.
- Balancing Point: The actuator stops rotating when the force from the feedback spring balances the force from the torque motor. At this point, the flapper and nozzle are in a new position, and the pilot valve is in a balanced state, maintaining the current pneumatic output.
- Reversal: When the input signal decreases, the torque motor reverses, closing the nozzle-flapper gap, raising the back pressure, and causing the pilot valve to move the opposite way. This vents air from the OUT1 port and supplies air to OUT2 (if applicable), causing the actuator to rotate in the opposite direction until the feedback spring and input signal forces are balanced again.
YT-1000 components and their function
The key components of the YT-1000 work together to translate the electrical signal into mechanical motion:
- Torque motor: An input signal (typically 4–20 mA) from a control system energizes the torque motor.
- Flapper and nozzle: The torque motor's force is transmitted to a flapper, which controls the gap to a nozzle. An increase in the input signal causes the flapper to move, changing the gap.
- Pilot valve (spool): The change in the nozzle's back pressure causes a spool in the pilot valve to move. This movement directs the flow of compressed air to and from the actuator.
- Actuator: The pneumatic output pressure from the pilot valve causes the actuator to move. Depending on the model (YT-1000L or YT-1000R), this results in linear or rotary motion.
- Feedback mechanism: A feedback lever and spring are mechanically connected to the actuator's shaft. As the actuator moves, the lever and spring also move, creating a balancing force.
- Balance of forces: The system continues to operate until the feedback spring's force balances the force from the torque motor, bringing the flapper back to its neutral position and stopping the actuator's movement.
Step-by-step working principle
- Receive input signal: The YT-1000 receives a 4–20 mA current signal from a control system.
- Convert to pneumatic signal:
- The current signal energizes a torque motor.
- The torque motor's magnetic force moves a flapper away from a nozzle.
- This widens the gap, causing the air pressure at the nozzle to decrease.
- The change in pressure shifts the pilot valve's spool, which directs a burst of compressed air to the actuator.
- Move the actuator: The pressurized air enters the actuator's chamber, causing the valve stem to move to its new position.
- Send feedback: As the actuator's stem moves, a feedback lever attached to the stem rotates a feedback cam. This action increases or decreases the tension on a feedback spring.
- Achieve balance: The system reaches its desired position when the opposing forces of the torque motor and the feedback spring are balanced. This causes the pilot valve to stop the air flow, and the actuator holds its new position.
- Maintain position: If the input signal remains constant, the positioner will maintain the actuator's position by balancing the forces. If the input signal changes, the cycle repeats to find the new balanced position.
 Full Datasheet Full Datasheet
Positioner Transmitter Feature YT-1000LDN132S00
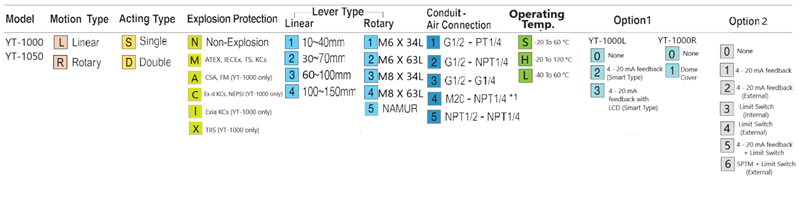
Basic Ordering Information
|



















